71
ออกแบบวงจรอิเล็กทรอนิกส์ด้วยคอมฯ / Re: งานครั้งที่ xxx
« กระทู้ล่าสุด โดย admin เมื่อ กรกฎาคม 30, 2019, 08:24:49 PM »xxxx
 กระทู้เมื่อเร็วๆ นี้
กระทู้เมื่อเร็วๆ นี้
| บทบาทครู | บทบาทนักศึกษา |
|---|---|
| อธิบายข้อปฏิบัติ และหลักการออกแบบ | ฟังและจดบันทึกความเข้าใจ |
| ให้คำปรึกษาและคำแนะนำการออกแบบ (งานครั้งนี้ครูไม่ทำเป็นตัวอย่างโดยให้นักศึกษาออกแบบด้วยตนเอง) | ดำเนินการออกแบบตามโจทย์ที่กำหนด หากมีข้อสงสัยให้ถามครูทันที |
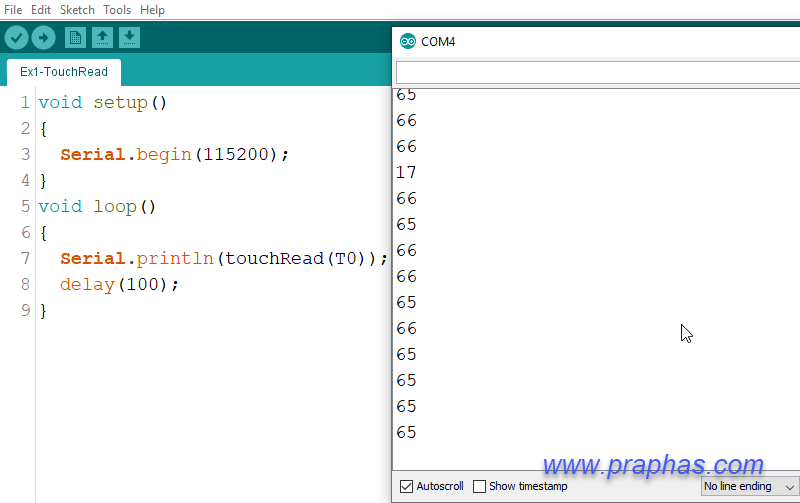
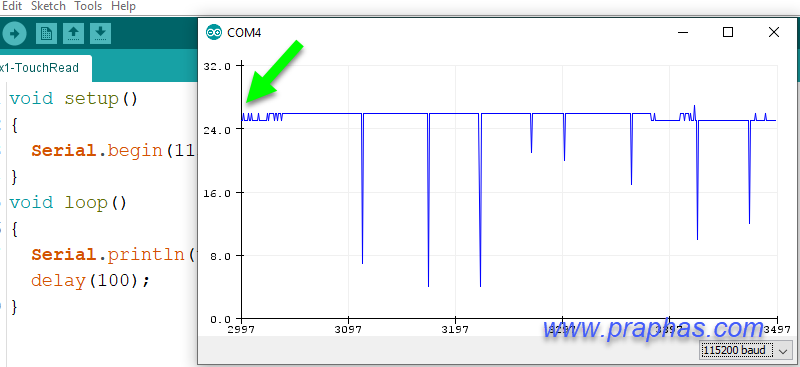
void setup()
{
Serial.begin(115200);
delay(1000);
}
void loop()
{
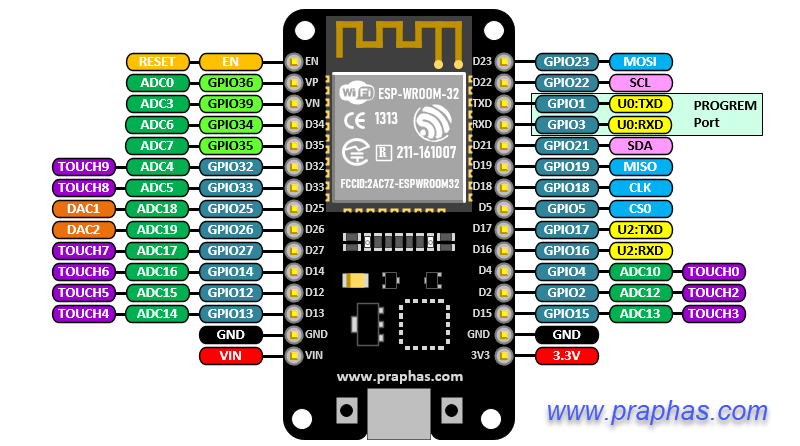
Serial.println(touchRead(T0));
delay(100);
}
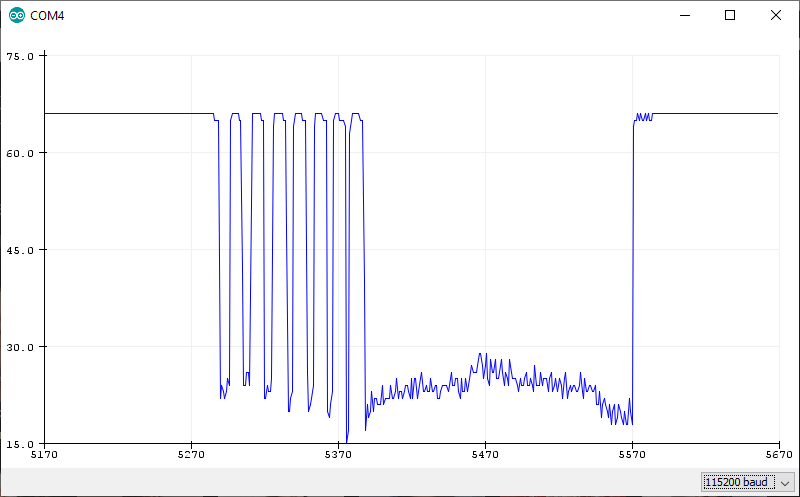
int touchValue = 0;
void setup()
{
Serial.begin(115200);
}
void loop()
{
for (byte i = 0; i < 100; i++)
{
touchValue += touchRead(T0);
delayMicroseconds(10);
}
touchValue/=100;
Serial.println(touchValue);
delay(50);
}
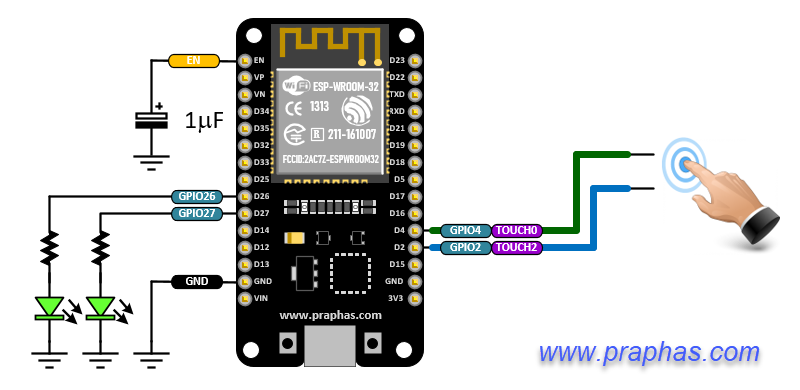
#define LED 27
int touchValue = 0;
void setup()
{
Serial.begin(115200);
pinMode(LED, OUTPUT);
}
void loop()
{
for (byte i = 0; i < 100; i++)
{
touchValue += touchRead(T0);
delayMicroseconds(10);
}
touchValue /= 100;
digitalWrite(LED, touchValue < 60 ? 1 : 0);
Serial.println(touchValue);
delay(50);
}
| รูปแบบ | คำอธิบาย |
|---|---|
| touchRead(Touch pin); | ฟังก์ชั่นอ่านค่าจากเซนเซอร์สัมผัส Touch pin: หมายเลขขาพอร์ตของเซอร์เซอร์สัมผัสที่ต้องการอ่านค่า เช่น x=touchRead(T0); หมายถึงอ่านค่าจากขา TOUCH0 เก็บไว้ในตัวแปร x |
| delayMicroseconds(us); | ฟังก์ชั่นหน่วงเวลาเป็นไมโครวินาที us:ค่าตัวเลขไมโครวินาทีที่ต้องการหน่วง |